

AUTEL EVO II Pro 6k RTK vs DJI Phantom 4 RTK drone accuracy analysis
The Autel Evo II Pro6k RTK drone and DJI Phantom 4 RTK drone are two of the most popular drones in the market. Both drones are similar in many ways but have some differences that set them apart from each other. In this comparison, we will take a look at the features of both drones and compare them to help you decide which one is right for you.

Autel EVO II Pro Test
We tested our Autel drone with two datasets from our customers. The first flight was conducted in a suburban area in Portugal while the second was done at a lumber company in Lithuania. This allowed us to test the drone in two very different circumstances. To measure accuracy, we set one Ground Control Point (GCP) and four validation points. Normally, we suggest using four GCPs but as we were only testing the drone, we used one.
The area covered in Portugal was approximately 1.53 hectares (3.77 acres) and we took 461 images to cover it.
The area in Lithuania was about 10,55 hectares (26.06 acres) and we took 840 images.

In Portugal, we used the double grid path of the drone as it gives more 3D buildings in point cloud. In Lithuania, we used the regular single grid path. After that, we opened 3Dsurvey. We loaded the images and imported telemetry data. After that, we started the bundle adjustment step. When it was finished, we went straight to the orientation step where we did the orientation with GCP data. We set one target as GCP and others as validators. After cantering the points, we got our results.
Portugal accuracy
The first table shows the accuracy of results in Portugal:

Standard deviation:
| Easting X [m] | Northing Y [m] | Height H [m] | Total [m] |
| 0.024 | 0.016 | 0.023 | 0.037 |
Lithuania accuracy
The second table shows the accuracy of results in Lithuania:

Standard deviation:
| Northing X [m] | Easting X [m] | Height H [m] | Total [m] |
| 0.016 | 0.006 | 0.016 | 0.024 |
We analyzed the point cloud accuracy in Portugal and found it to be 3.7 cm while in Lithuania it was 2.4 cm, which is vastly precise. If we took even more images of the area we would be able to get even better results, but in this case, it wasn’t necessary.
Following the good results we obtained from testing the Autel Evo 2 RTK on its own, we decided to compare it side by side with a Phantom RTK drone.
Autel Evo II Pro 6k RTK vs Phantom 4 RTK drone
For the purpose of the comparison test, we mapped an area of approximately 4.5 hectares with both drones. We placed one ground control point and seven validation points on the test site. The single ground control point is used to increase the accuracy of georeferencing and the seven validation points are used for accuracy evaluation only.
Field test
Firstly, we mapped the test area with the Autel drone. We used the double grid flight path on Evo II to get the best possible accuracy and to best estimate the rolling shutter effect that results from the Autel drone having a rolling shutter type sensor. Secondly, we mapped the same area with the Phantom RTK drone as well. This time we flew a single grid mission as the Phantom 4 RTK drone has a global shutter type sensor.
The biggest difference between the two drones observed during the field test was that Phantom can map a larger area than Evo II because during flight, Evo II will stop at corners, rotate and accelerate again. Phantom, on the other hand, takes corners without decreasing flight speed.
We also detected that Evo 2 was a bit quieter which is very convenient when mapping public areas.
Processing
After finishing fieldwork, we returned to the office and imported images from both drones. After that, we completed the “Bundle adjustment” step. Then doing the “Orientation step”, we used central point 1005 as ground control point used for georeferencing and other points (1001, 1002, 1003, 1004, 1006, 1007, 1008) as validation points used for assessing accuracy results obtained in mapping. We assessed accuracy of results from each drone as an average validation point error. The validation point error is difference between where we measured validation point with our survey grade GPS instrument and where this validation point is in our photogrammetric model.
Here’s a screenshot of the test site and GCP and validation point configuration:

For each drone test flight, we obtained the following results:
Results for the Evo 2 drone:
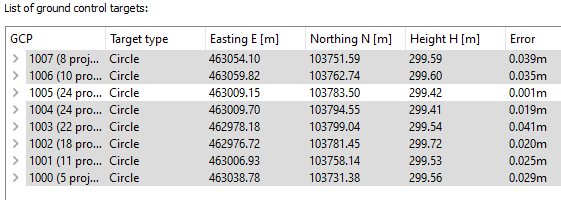
The average error is 0,026m.
Results for the Phantom 4 drone:
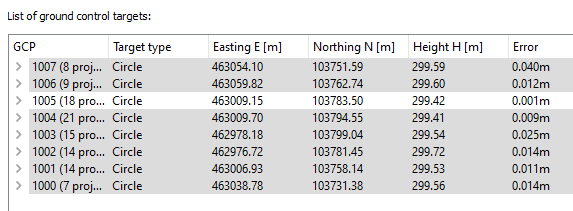
The average error is 0,016m.
Conclusion
As we can see, Phantom 4 performed a bit better than Evo 2. Yet both results are extremely satisfactory as they give us more than good enough precision to make very accurate measurements. So it all comes down to your budget and preferences. In our opinion, both drones are good enough for practically every project. The biggest downside to Evo 2 is speed and as for Phantom 4, it is the price.
Written by:
Vid Peterman & Ivan Žan Barbarić